


Source of this article: Zhiche Technology
Last year, the video of Huawei Wenjie M5 Intelligent Driving Edition City Navigation driving independently in Chongqing caused a lot of onlookers on social media. The roads in Chongqing are quite complex, and the behavior of traffic participants also changes a lot. The Huawei Wenjie M5 Intelligent Driving Edition skillfully avoids and overtakes, and many people simply say that it is “better than an experienced driver.”. Subsequently, models such as the Xiaopeng G6 and the Wenjie New M7, which have high-speed and urban navigation assistance functions, received a large number of orders. It seems that car buyers are paying increasing attention to intelligent driving, and advanced intelligent driving has become a key purchasing factor for some users. As the trend of intelligent driving approaches this round, high-precision maps have become a “constraint” for car companies to promote advanced intelligent driving. The de mapping of autonomous driving has also become a consensus among car companies, which is about to usher in a new turning point for the implementation of intelligent driving.
01The important role of high-precision maps in intelligent driving
High precision maps play an extremely important role in the perception layer of autonomous driving: high-precision maps are electronic maps with higher accuracy and more data dimensions, which are reflected in their accuracy to the centimeter level. The data dimension is more reflected in their inclusion of static information related to traffic besides road information, which is completely different from the commonly used navigation maps. They can be understood as the overall computing power model written for the vehicle, and can also be said to be a sensor with “beyond line of sight” perception ability.
Before 2023, almost all landing navigation assistance systems in China require high-precision maps as the core part of the autonomous driving perception layer, which can compensate for the performance boundaries of ordinary sensors, provide important prior information, and assist in the intelligent landing of bicycles; At the same time, a lot of static information can be pre stored on high-precision maps, greatly reducing the computational burden of real-time perception detection, allowing perception to have more resources for dynamic object recognition and tracking. In fact, most intelligent driving solutions are also designed and developed based on high-precision maps.
However, the shortcomings of high-precision maps are also evident. Firstly, car companies often rely on collaborating with map merchants rather than collecting high-precision map information themselves. At present, most map merchants can only update high-precision maps once every three months, while for autonomous driving, the ideal state is daily updates or even hourly updates. In addition, in a highly competitive market, car companies also need to consider the high cost of high-precision maps. It is understood that the current surveying and mapping cost for centimeter level maps on the market is about 10 yuan per kilometer, while the surveying and mapping cost for centimeter level maps can reach thousands of yuan per kilometer.
02Degramming has become the main theme of automotive companies
Although high-precision maps can help car companies achieve the landing of intelligent driving functions more quickly, at the same time, their inherent shortcomings also lead to their constraints, and the maximum ability of intelligent driving cannot be fully exerted, and many scenarios are still difficult to solve. Under such conditions, Huawei and Xiaopeng have taken the lead in sparking a wave of “de mapping” intelligent driving in China, and the technology roadmap implemented mainly consists of two aspects:
On the one hand, it is through crowdsourcing to create maps. For example, Tesla did not completely abandon maps, but instead adopted a form of crowdsourcing to draw the maps needed for driving. Collecting road information through sold vehicles, drawing a map, and deploying it on the vehicle end is still considered a pre installed map. Some professionals believe that Tesla’s crowdsourced map is also a type of lightweight map. But this path is difficult to navigate in the current domestic market. Firstly, most domestic new energy vehicle companies find it difficult to match Tesla’s sales, which results in their sold vehicles being able to collect far less data than Tesla’s; Secondly, China is currently tightening its approval process for the Class A qualification of high-precision maps. Enterprises without such qualifications are unable to conduct high-precision collection, surveying, and mapping on domestic roads.
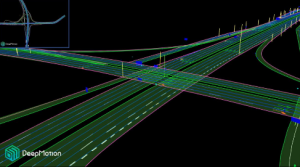
Another approach is to construct real-time local maps through the technology architecture of Bird’s eye view (BEV)+Transformer at the perception level. BEV transforms the traditional perception method of 2D autonomous driving images with distance measurement into 3D perception from a bird’s eye view perspective; Transformer was first proposed by Google and can convert multi camera data from image space to BEV space. This technology architecture can unify the data collected by cameras and other hardware into one space for fusion, and then use Transformer models to process a large amount of data, such as real lane recognition, determining drivable space, etc., making vehicle perception more stable and prediction more reliable. With the significant improvement of vehicle perception ability, the demand for high-precision maps for advanced intelligent driving will be reduced.
However, under this route, another key issue becomes prominent: whether the “de mapping” intelligent car driving solution involves surveying and mapping behavior? This actually belongs to a relatively vague area in current policies and regulations, and in order to comply with policy compliance, the cooperation between car companies and image merchants will inevitably become increasingly close. On the one hand, map based services are usually dynamically changing (mainly reflected at the data element level) to supplement autonomous driving capabilities. On the other hand, considering the reduced demand for map accuracy and data elements, crowdsourced vehicles have become the key to ensuring map freshness.
03City NOA entering redemption period without a map
City NOA (Navigation on Autopilot) is a driving assistance system developed for urban traffic environments. Its main function is to achieve point-to-point intelligent driving and face commuting and other travel scenarios with the support of high-precision maps, LiDAR, millimeter wave radar and other sensing layers. Driven by Tesla’s Transformer+Bev architecture, intelligent driving algorithms are approaching end-to-end intelligent driving models, ushering in a new era of urban NOA for intelligent driving.

In China, the competition for urban NOA is becoming increasingly fierce. Not only are there representatives of new forces such as Xiaopeng, NIO, and SAIC Zhiji, but there are also models such as Huawei series Geely Fox, Avita, and Wenjie that have opened their doors, and there are also traditional car companies like Great Wall. Currently, most of the goals are to achieve NOA in 50-100 cities by 2024. At the same time, Huawei also plans to promote ADS 2.0 without graphics nationwide this year. The key to helping the rapid development of urban NOA in various cities across the country is the overall solution of “de mapping” intelligent driving. Only by no longer overly relying on offline high-precision maps can intelligent driving functions be increasingly accepted by consumers.
04Win win cooperation between automotive companies and image merchants
Although car companies often talk about “no map” when promoting to the outside world, in fact, from the information I have learned in the industry so far, most car companies have not completely abandoned high-precision maps, but are striving towards a “light map” direction. Although the importance of maps in supplementing in line of sight information has decreased with the improvement of perception ability of intelligent driving vehicles, they still play an important role in supplementing out of line of sight information, directly affecting driving comfort and efficiency. Therefore, there is a possibility of dynamic changes in the demand for graphics in cars, but the feasibility of a solution without graphics is not strong. In the future, the author believes that there is still a possibility of win-win cooperation between car companies and image merchants: for example, by adopting a business direction of map crowdsourcing and data closed-loop, the role of image merchants is irreplaceable. The implementation and application of large models have solved the problem of dependence on high-precision maps on the vehicle end, but at the same time, the improvement of perception ability and real-time mapping on the vehicle end have also made it possible for civilian vehicles to build maps from multiple sources. Although there are certain problems in various aspects of data collection, data transmission, data cleaning, data processing, and data application, as well as difficulties in profitability evaluation in cost calculation, it is still a win-win approach for car companies and image merchants.
Through in-depth research, we have found that both light and no maps are not sufficient to completely replace traditional map functions. The role of map merchants is irreplaceable in many aspects, including but not limited to map based data services, map crowdsourcing, and data closed-loop business. In the foreseeable future, the role of maps in autonomous driving remains indispensable.
-End-
Source: Wikimedia. New Energy Vehicles Author: Zhiche Technology IV
Special statement: The above content is reproduced from Wikimedia. Author of New Energy Vehicles: Zhiche Technology IV, with the aim of disseminating more information. If there is any infringement, please contact and delete it. The reproduced content does not represent the position of CNEV New Energy Vehicles Network (www.chinev. net).
Some of the images are from the internet. If there is any infringement, please inform us to delete them
